Mapping
Kool: Tallinna Tehnikaülikool (TalTech, TTÜ)
Aine: Robootika
Kategooria: Robootika
Postitatud: 13 märts 2025
Postitaja: ArmastusväärneHamster
Kirjeldus
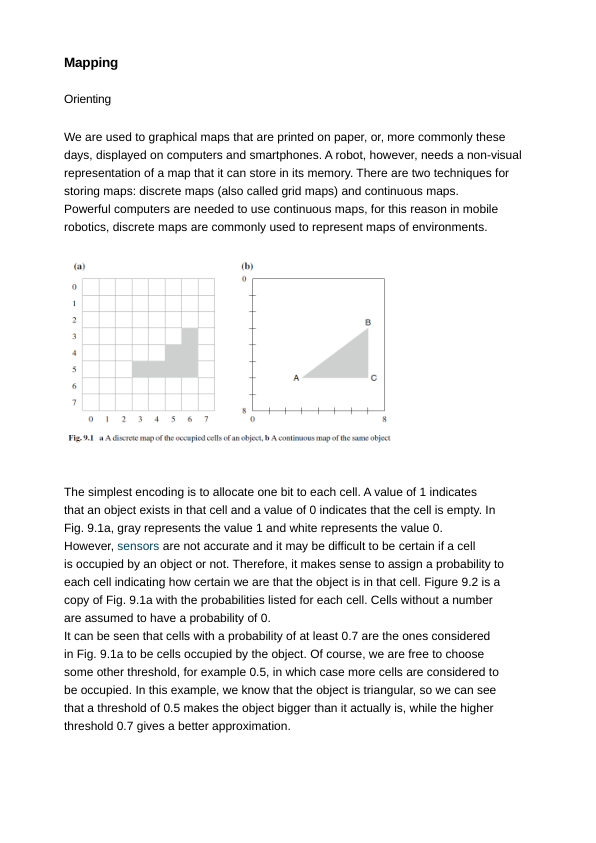
Mapping Orienting We are used to graphical maps that are printed on paper or more commonly these days displayed on computers and smartphones. A robot however needs a non-visual representation of a map that it can store in its memory. There are two techniques for storing maps discrete maps (also called grid maps) and continuous maps. Powerful computers are needed to use continuous maps for this reason in mobile robotics discrete maps are commonly used to represent maps of environments. The simplest encoding is to allocate one bit to each cell. A value of 1 indicates that an object exists in that cell and a value of 0 indicates that the cell is empty. In Fig. 9.1a gray represents the value 1 and white represents the value 0. However sensors are not accurate and it may be difficult to be certain if a cell is occupied by an object or not. Therefore it makes sense to assign a probability to each cell indicating how certain we are that the object is in that cell. Figure 9.2 is a copy of Fig…