Sense-Plan-Act
Kool: Tallinna Tehnikaülikool (TalTech, TTÜ)
Aine: Robootika
Kategooria: Robootika
Postitatud: 13 märts 2025
Postitaja: ArmastusväärneHamster
Kirjeldus
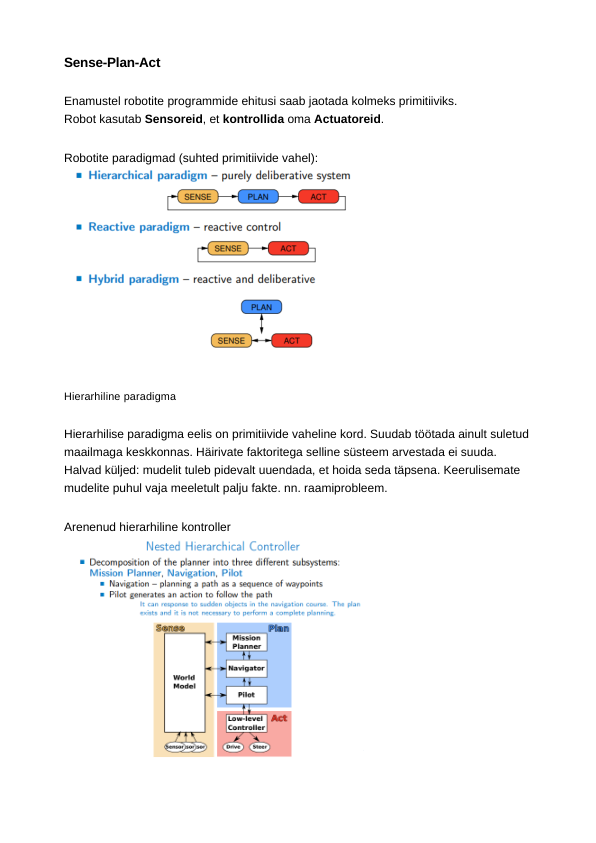
Sense-Plan-Act Enamustel robotite programmide ehitusi saab jaotada kolmeks primitiiviks. Robot kasutab Sensoreid et kontrollida oma Actuatoreid. Robotite paradigmad (suhted primitiivide vahel) Hierarhiline paradigma Hierarhilise paradigma eelis on primitiivide vaheline kord. Suudab töötada ainult suletud maailmaga keskkonnas. Häirivate faktoritega selline süsteem arvestada ei suuda. Halvad küljed mudelit tuleb pidevalt uuendada et hoida seda täpsena. Keerulisemate mudelite puhul vaja meeletult palju fakte. nn. raamiprobleem. Arenenud hierarhiline kontroller Koos lisaelementidega võib ka hierarhiline süsteem päris võimas olla. Hierarhilied paradigmad toetavad süsteemide arengut semi-autonoomsetest täisautonoomseteni. Reageeriv paradigma Bioloogiliselt inspireeritud inimestest ja loomadest kes sageli teevad valikuid ilma planeerimata. Väldib raamiprobleemi. Agent on iseorganiseeriv ja iseseisev olend. Ta saab maailmas asju muuta ja seda tajuda. Tal on eneseteadvus. Reageerivas paradigma…